 Fig.1
Fig.1CONTROLLO DEGLI ATTUATORI
Fra le tecniche di controllo degli attuatori, quella di tipo impulsivo ha acquistato nel tempo sempre piu' importanza. Questa tecnica, basata sulla modulazione a larghezza di impulsi PWM (Pulse Width Modulation), si e' rivelata particolarmente efficace ed adatta nel caso del controllo di velocita' dei motori elettrici.
Tecnica di controllo PWM
Schema di principio di un controllo di velocita' PWM:
Fig.1
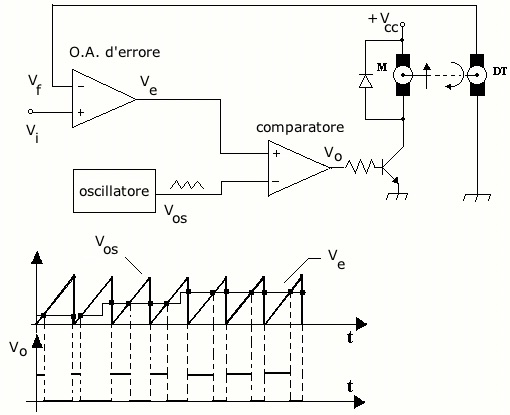
Dalla Fig.1 si nota come, utilizzando la tecnica PWM, il motore M viene alimentato dalla tensione Vo (in uscita al comparatore), il cui andamento risulta rettangolare (o impulsivo) con un periodo T costante ed un ciclo di utilizzo (duty-cycle) d variabile nel tempo.
La frequenza della tesione che alimenta il motore e' compresa tra qualche KHz e poco piu' di 20 KHz, per evitare che, attraverso la carcassa del motore e dei conduttori che lo alimentano, si generino e si diffondano rumori nella gamma delle frequenze udibili (20 Hz - 20 KHz).
Descrizione del controllo di velocita' PWM
La presenza di un amplificatore d'errore rileva la differenza fra una tensione di riferimento (Vi) e la tensione di reazione (Vf), generata da una dinamo tachimetrica. All'uscita di questo amplificatore viene prodotta una tensione errore (Ve).
Un comparatore confronta (Ve) con una tensione (Vos) a dente di sega (o triangolare) di frequenza costante, generata da un opportuno oscillatore.
La tensione (Vo), in uscita al comparatore, e' un'onda rettangolare di frequenza costante e duty-cycle variabile, che pilota un BJT di potenza, facendolo funzionare in saturazione/interdizione. In pratica, quando Vo assume valore alto il BJT satura e cio' provoca la rotazione del motore; invece, quando Vo assume valore basso il BJT si interdice ed il motore cessa di essere alimentato. E' importante osservare che il motore risente del valore medio della tensione di armatura, il cui andamento temporale, uguale a quello di Vo, dipende dal duty-cycle secondo la relazione:
Vam= (tH/T)*VaM = d*VaM
dove:
VaM rappresenta il valore massimo della tensione di armatura;
tH e' il tempo di durata del livello alto della tensione Vo.
Se, ad esempio, il duty-cycle del segnale prodotto nel carico e' pari al 75%, e' come se al motore venisse applicata una tensione media pari a 0,75*VaM.
Quando la velocita' del motore diminuisce, per esempio a causa di un aumento della coppia di carico applicata, oppure a causa di una diminuzione della tensione di alimentazione, allora diminuisce anche la tensione prodotta dalla dinamo tachimetrica; di conseguenza cresce Ve e quindi aumenta il duty-cycle all'uscita del comparatore. L'aumento del duty-cycle comporta un aumento del valor medio della tensione di armatura Vam che, a sua volta, contrasta la diminuzione iniziale di velocita'. Accade l'inverso se la velocita' del motore tende ad aumentare.
Il diodo posto in antiparallelo al motore evita che il BJT, durante la commutazione ON-OFF, riceva pericolose sovratensioni ai suoi capi, provocate dalla componente induttiva (La) del motore.
Con la tecnica di modulazione a larghezza di impulsi la potenza dissipata dal BJT di potenza, che provvede a pilotare il motore, e' molto bassa. Infatti, il BJT funziona da interruttore e la dissipazione di potenza avviene nella fase in cui il BJT e' saturo (bassa tensione ai suoi capi) e nella fase di commutazione, che normalmente risulta essere molto breve.